電子工作etc
■RS232C通信(パリティ対応)
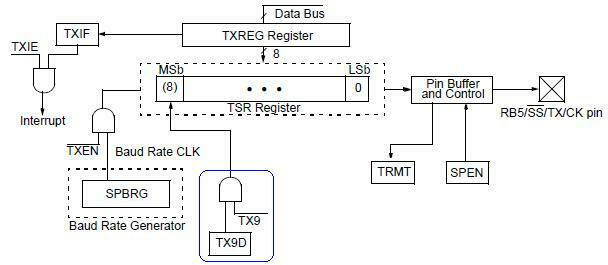
★概要 RS232C(USART)を使用して、パソコンとPIC間で通信を行う場合、事例の殆どが“パリティ無し”で行われ ています。つまり、スタート1ビット、データ8ビット、パリティー無し、ストップ1ビットの計10ビットで通信します しかし、PICが内蔵するUSARTモジュールには、パリティやアドレスに使用可能な“TX9D”や“RX9D”がある
ので、これらを利用したパリティ対応についての実験を行ってみました。 <USARTモジュールのブロックダイアグラム(送信部分)>
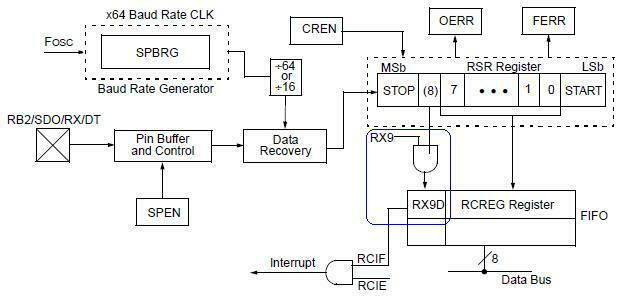
 <USARTモジュールのブロックダイアグラム(受信部分)>
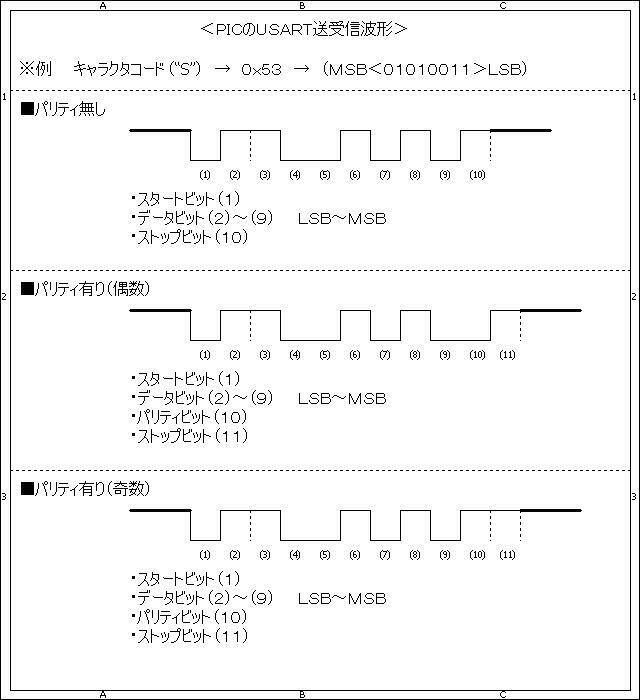
 <USARTモジュールの送受信波形>
 ★実験内容
mikroCが提供するUSARTライブラリには、パリティに関する機能が無いため、新たに自作関数を作成しまし た。指定できるパリティモードは、偶数、奇数、無しの3種類です。 実際の確認は、PICとパソコンをRS232Cで接続して行います。
<PIC側>
・起動時は、9600bps、パリティ無しです。 ・パソコンからのデータを受信し、受信したデータをパソコンに送信します。(エコーバック) ・スイッチ(SW)を、押下する毎にパリティのモードが切り替わります。 無し→偶数→奇数→無し。。。。。。。。。。 ・関数の利用の流れ(例)
:USARTモジュール初期化 → UART1_Init(9600); :パリティモード設定 → UART1_Set_Parity_Mode(EVEN_PARITY); :文字列送信 → UART1_Write_Text_Ex("JF3SFB\r\n"); :受信データ有無確認 → UART1_Data_Ready(); :データの受信 → UART1_Read_Ex(); :データの送信 → UART1_Write_Ex('A'); <パソコン側>
・ハイパーターミナルを、9600bpsで使用します。 ・パリティの設定は、実験の内容によって変更します。 <実験の流れ>
①PIC側(パリティ無し)、パソコン側(パリティ無し)で、エコーバックが、正しく行われるかを確認します。 ②PIC側(偶数)、パソコン側(偶数)で、エコーバックが、正しく行われるかを確認します。 ③PIC側(偶数)、パソコン側(奇数)で、エコーバックが、パリティエラーになるかを確認します。 ④PIC側(奇数)、パソコン側(奇数)で、エコーバックが、正しく行われるかを確認します。 ⑤PIC側(奇数)、パソコン側(偶数)で、エコーバックが、パリティエラーになるかを確認します。 <mikroCが提供するUSARTライブラリ>
<自作関数>
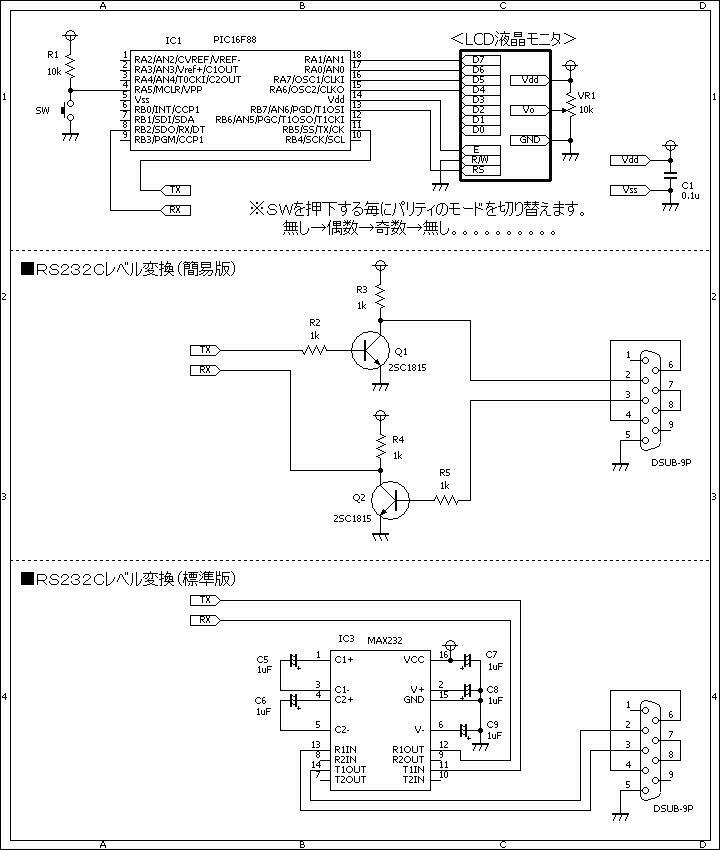
★実験回路図
 ★実験結果
パソコン側のハイパーターミナルで、適当な文字を入力し、エコーバックされるかを確認します。 最初の文字列(“JF3SFB”)は、PIC側から起動時に送信されたものです。 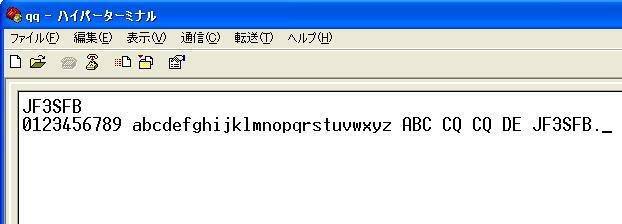 ①PIC側(パリティ無し)、パソコン側(パリティ無し)で、エコーバックが、正しく行われるかを確認します。  ②PIC側(偶数)、パソコン側(偶数)で、エコーバックが、正しく行われるかを確認します。 ③PIC側(偶数)、パソコン側(奇数)で、エコーバックが、パリティエラーになるかを確認します。   ④PIC側(奇数)、パソコン側(奇数)で、エコーバックが、正しく行われるかを確認します。 ⑤PIC側(奇数)、パソコン側(偶数)で、エコーバックが、パリティエラーになるかを確認します。   電子工作etc
|